Lots of cool things happening in 2020, so stay tune to this blog for updates.
My Robot Store
This is my robot store! Click on picture above for more information
Tuesday, February 22, 2011
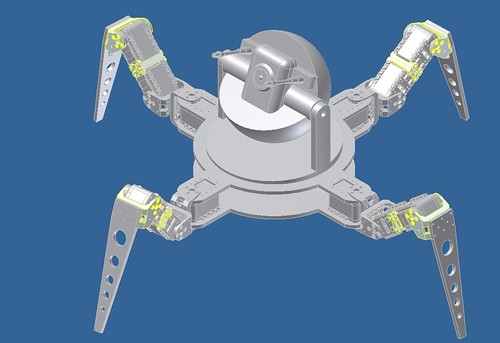
Mech Warfare Bot 2011
This is a team build between me, Luis and Juan. We are trying to get this robot ready for Robogame's 2011. I will blog more about our progress. The 3-d printer is down and we are waiting for parts!
That looks sweet, man 3d printers sure make everything simpler, that'd be a large undertaking machining wise if you made it from a different material with a mill.
I've made a couple parts on a 0.1 mm resolution abs printer, but I always wonder in a situation with such large parts how much of an issue part failure with shear in the printer's vertical axis is. Especially with how strong Dynamixels are
Also, have you considered using a beefier motor at the second position out from the center mass of the robot on the arms? This is the motor with the largest bending moment in motion, I think you might be better off with a 64 if you're approaching the payload limit of the motors.

That looks sweet, man 3d printers sure make everything simpler, that'd be a large undertaking machining wise if you made it from a different material with a mill.
ReplyDeleteI've made a couple parts on a 0.1 mm resolution abs printer, but I always wonder in a situation with such large parts how much of an issue part failure with shear in the printer's vertical axis is. Especially with how strong Dynamixels are
Also, have you considered using a beefier motor at the second position out from the center mass of the robot on the arms? This is the motor with the largest bending moment in motion, I think you might be better off with a 64 if you're approaching the payload limit of the motors.
Also, check out these robots if you're interested in multi-legged walkers
ReplyDeletehttp://www.romela.org/main/MARS:_Multi_Appendage_Robotic_System
http://www-robotics.jpl.nasa.gov/systems/system.cfm?System=5
http://robotics.eecs.berkeley.edu/~ronf/PAPERS/ahoover-iros08.pdf
That last one has a pretty cool manufacturing method/awesome linkage system to achieve the movement (and it's only 2.4 g)
Thanks for the information!!
ReplyDelete