
I have played around with the Kinect 1 and the Carmine 1.08.
Both are awesome sensors for their price.
The main issue I have with them is
their size. They are just too big to fit on anyone of my humanoid robots.
The
DARwIn-OP can almost use the Carmine 1.08 or Carmine 1.09 instead of its
existing head.

Evolution of the PrimeSense sensor, PrimeSense is the
company that developed the Kinect sensor for Microsoft.
Carmine 1.08
Field of View 57.5×45
Range 0.8m-3.5m
VGA depth map (640×480)
Color and Audio support
USB2.0 powered
Standard off the shelf components
OpenNI compliant
Carmine 1.09
Field of View 57.5×45
Range 0.35m-1.4m
VGA depth map (640×480)
Color and Audio support
USB2.0 powered
Standard off the shelf components
OpenNI compliant
What makes the 1.09 interesting is its smaller min range of .35 meters.
Capri 1.25 or Kinect 2!
Using the next-gen Capri PS1200 SoC
Significant size reduction
High performance
Cost reduction
As you can see in the pictures a huge size changes, plus you
get a huge improvement in performance if the rumors are correct!

It looks like it can fit in the existing DARwIn-OP head!!

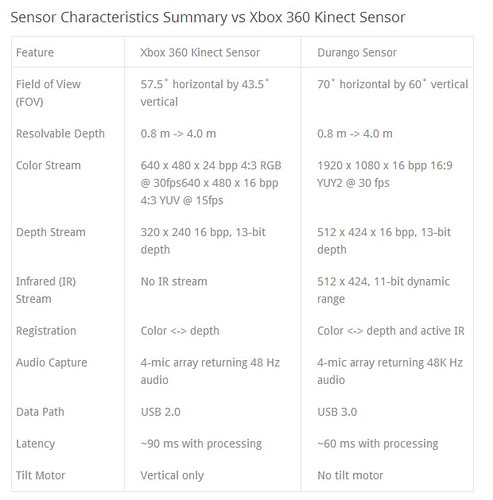
Rumored specifications for the Kinect 2. The Capri 1.25 may only have the specs of the Kinect 1 without a RGB camera?
Links to more information.
PrimeSense website.
Vgleaks blog post.
IEEE blog post.
No comments:
Post a Comment